
Ở vùng biển Caribe và các khu vực ven biển ngoài khơi Florida và Georgia của Hoa Kỳ, một kẻ xâm lược có vẻ ngoài kỳ lạ đang đe dọa các hệ sinh thái địa phương: cá mao tiên. Thật không may, thiếu động vật ăn thịt tự nhiên và nguy hiểm đối với cá nhờ gai độc gây đau đớn của nó, cá mao tiên không dễ quản lý. Giờ đây, các sinh viên đại học tại Học viện Bách khoa Worcester (WPI) đã thiết kế và tạo mẫu một robot dưới nước có thể xử lý loài xâm lấn này và giúp ngư dân địa phương cũng kiếm được lợi nhuận, lên tới 20 đô la mỗi pound.
Hai thành viên của nhóm sinh viên WPI, Katharine Conroy và Alex Antaya, đã nói với EM về dự án.
Bà Conroy giải thích : “Dự án này được hình thành cách đây vài năm khi Giáo sư Craig Putnam , một thợ lặn ham học hỏi, bắt đầu thấy số lượng cá mao tiên ngày càng tăng và sự suy giảm của nhiều loài cá khác. “Sau khi nói chuyện với người dân địa phương và những người khác lo ngại về tình hình, Giáo sư Putnam coi đây là cơ hội hoàn hảo để tạo ra sự khác biệt với ngành công nghệ người máy.”
Là một phần của nỗ lực không ngừng, các nhóm sinh viên WPI đã hy vọng giảm bớt mối đe dọa từ cá mao tiên gây nguy hiểm cho sức khỏe của cả các rạn san hô và các loài cá khác nhau quan trọng về mặt giải trí và thương mại.
“Phần đính kèm săn cá sư tử lần đầu tiên được thiết kế bởi nhóm Dự án đủ điều kiện chính (MQP) năm ngoái và sẽ được tiếp tục trong năm nay bởi nhóm hiện tại,” bà Conroy nói chi tiết. “Chúng tôi hy vọng có thể gắn thiết bị săn cá mao tiên hiện tại vào một ROV dưới nước. Điều này sẽ cho phép chúng tôi thực hiện thử nghiệm rộng rãi hơn cùng với việc làm việc trên hệ thống định vị ”.
Dạy rô bốt câu cá
Rõ ràng, việc dạy robot săn cá mao tiên liên quan đến việc huấn luyện hệ thống về một số nhiệm vụ nhỏ hơn.

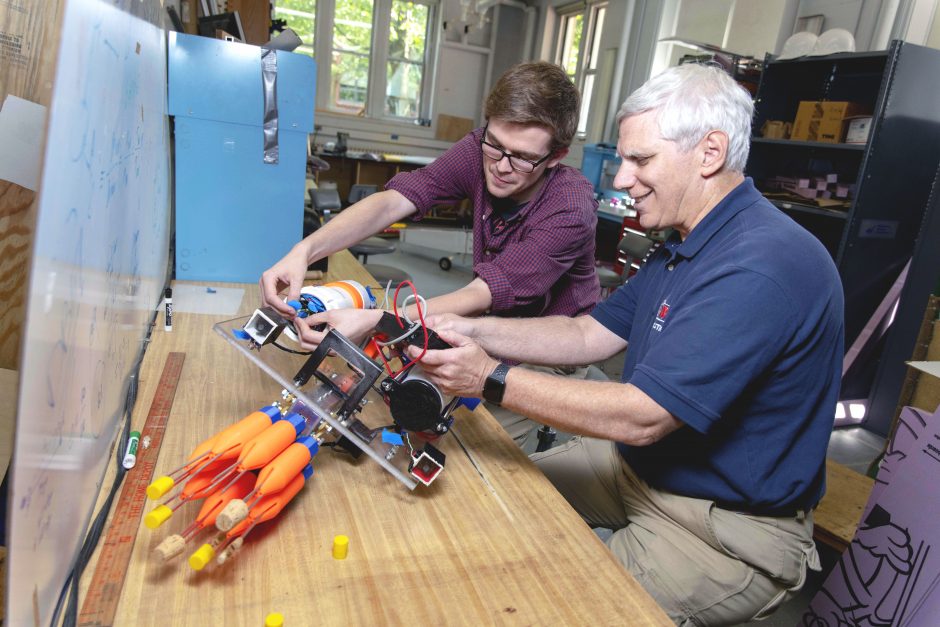
Hình ảnh này của robot cho thấy tám mũi giáo màu cam được gắn trên băng chuyền màu xanh lam, hai hộp nhỏ ngay phía sau băng chuyền chứa máy ảnh, buồng điện tử phía sau máy ảnh bên phải và buồng nổi phía sau máy ảnh bên trái. (Nguồn: Học viện Bách khoa Worcester)
“Phần mềm cụ thể được sử dụng cho hệ thống phân loại được gọi là TensorFlow ™,” ông Antaya mô tả. “Hệ thống đã được 'huấn luyện' bằng cách cho máy ảnh xem hàng trăm hình ảnh của cá mao tiên. Đây là các phân loài cá khác nhau (một vài loài khác nhau được tìm thấy ở Caribê), với nhiều kích cỡ khác nhau, từ các góc độ khác nhau, vân vân. ”
Phần mềm TensorFlow ™ ban đầu được chạy trên máy tính Raspberry Pi và mặc dù nó hoạt động nhưng nó quá chậm để hữu ích.
Ông Antaya nhận xét: “Phải mất 4 đến 5 giây để xác định chính xác một con cá mao tiên. “Nhóm đã tìm thấy một sản phẩm của Intel có tên là Movidius ™ Neural Compute Stick hoạt động như một bộ tăng tốc phần cứng cho loại ứng dụng này.”
Với bộ gia tốc mới, robot có thể đưa ra quyết định nhanh chóng hơn.
Ông Antaya nhận xét: “Hệ thống này đã được 'huấn luyện' bằng cách cho máy ảnh xem hàng trăm hình ảnh về các loài phụ khác nhau của cá khi một vài loài khác nhau được tìm thấy ở Caribê, với nhiều kích cỡ khác nhau, từ các góc độ khác nhau, v.v.". “Điều này hoạt động đặc biệt một phần là do 'ngoại hình' độc đáo của cá mao tiên. Với tất cả các gai có nọc độc nhô ra khỏi cơ thể, cá mao tiên đặc biệt dễ phân biệt với các loài cá khác ở vùng Caribe ”.
Một loài như thế này là động vật ăn thịt - và không có động vật ăn thịt nào bên ngoài môi trường sống tự nhiên - đặc biệt có hại cho hệ sinh thái địa phương.
Bà Conroy nói: “Và thêm vào vấn đề này, cá mao tiên đang ăn nhiều loài cá làm sạch và duy trì rạn san hô, điều này gây thêm căng thẳng cho nó. “NOAA đã xác định rằng nếu không có sự can thiệp, quần thể cá mao tiên sẽ tiếp tục mở rộng và có những tác động bất lợi đến rạn san hô.”
Cuối cùng, robot được thiết kế để có thể được triển khai bởi con người trong khi câu cá.
Ông Antaya cho biết thêm: “Mục tiêu của dự án là thấy hệ thống này được ngư dân sử dụng để thu hoạch cá và bán cho các nhà hàng địa phương. “Hoạt động khái niệm sẽ có một ngư dân điều hướng đến một khu vực mà cá sư tử được biết đến; từ đây, họ sẽ có thể ném hệ thống lên bờ. Tại thời điểm này, hệ thống sẽ tiếp quản và tự động điều hướng đến đáy biển và bắt đầu tìm kiếm cá mao tiên. "

Cận cảnh băng chuyền di chuyển các mũi giáo vào vị trí để có thể đâm vào cá mao tiên bằng một trục kim loại. Một trong những camera của robot có thể được nhìn thấy trong hộp kín nước nhỏ ở bên trái. (Nguồn: Học viện Bách khoa Worcester)
Thiết kế sơ bộ của hệ thống định vị tự động của robot và khả năng vạch đường đi của nó khi nó được ném xuống nước hoặc thiết lập mô hình tìm kiếm và tránh đá ngầm vẫn chưa được xử lý. Mặc dù có tồn tại các rô bốt thương mại có thể săn cá mao tiên, nhưng tất cả chúng đều yêu cầu người điều khiển phải được buộc chặt vào rô bốt, một nhu cầu có thể làm hỏng cấu trúc mỏng manh của các rạn san hô. Robot của nhóm, được tự động hóa, loại bỏ những vấn đề này.
Bà Conroy giải thích: “Cơ chế máy thu hoạch Lionfish bao gồm một cơ chế sáng tạo của Geneva cho phép nó tác động từng mũi giáo vào đúng vị trí. Sau khi phân phối từng mũi giáo nổi tích cực, cơ cấu quay cho đến khi một bánh xe dẫn động bắt được. Từ đó, bánh lái di chuyển vào vị trí chính xác để bắn một mũi thương khác.
Sau khi đặt các ngọn giáo nổi vào con mồi và rút các trục ra, robot sẽ bù đắp cho bất kỳ lực nổi nào bị mất từ các mũi giáo đã sử dụng của nó bằng cách mở rộng khoang kín nước, tích hợp của nó, sử dụng không khí để cân bằng lực nổi bị mất.
Hiện tại, nhóm nghiên cứu đang bận rộn để đảm bảo rằng robot không mắc lỗi phân loại. Với sự trợ giúp của việc đào tạo trên nhiều hình ảnh, giờ đây nó có thể xác định con mồi nhanh hơn nhiều — và người dùng có thể yên tâm về khả năng phán đoán của nó.
Giờ đây, việc phân loại có thể thực hiện trong khoảng 100 mili giây - một tốc độ đủ để tạo ra các lệnh lái cho nền tảng ROV. “Lưu ý rằng hệ thống phân loại cũng đã được huấn luyện về những gì robot không nhắm đến — cụ thể là thợ lặn!” Ông Antaya cho biết thêm.
2 Bình luận